Nalu-Wind Input File
Nalu-Wind requires the user to provide an input file, in YAML format, during
invocation at the command line using the naluX -i flag. By default,
naluX will look for nalu.i in the current working directory
to determine the mesh file as well as the run setup for execution. A sample
nalu.i is shown below:
# -*- mode: yaml -*-
#
# Example Nalu input file for a heat conduction problem
#
Simulations:
- name: sim1
time_integrator: ti_1
optimizer: opt1
linear_solvers:
- name: solve_scalar
type: tpetra
method: gmres
preconditioner: sgs
tolerance: 1e-3
max_iterations: 75
kspace: 75
output_level: 0
realms:
- name: realm_1
mesh: periodic3d.g
use_edges: no
automatic_decomposition_type: rcb
equation_systems:
name: theEqSys
max_iterations: 2
solver_system_specification:
temperature: solve_scalar
systems:
- HeatConduction:
name: myHC
max_iterations: 1
convergence_tolerance: 1e-5
initial_conditions:
- constant: ic_1
target_name: block_1
value:
temperature: 10.0
material_properties:
target_name: block_1
specifications:
- name: density
type: constant
value: 1.0
- name: thermal_conductivity
type: constant
value: 1.0
- name: specific_heat
type: constant
value: 1.0
boundary_conditions:
- wall_boundary_condition: bc_left
target_name: surface_1
wall_user_data:
temperature: 20.0
- wall_boundary_condition: bc_right
target_name: surface_2
wall_user_data:
temperature: 40.0
solution_options:
name: myOptions
use_consolidated_solver_algorithm: yes
options:
- element_source_terms:
temperature: FEM_DIFF
output:
output_data_base_name: femHC.e
output_frequency: 10
output_node_set: no
output_variables:
- dual_nodal_volume
- temperature
Time_Integrators:
- StandardTimeIntegrator:
name: ti_1
start_time: 0
termination_step_count: 25
time_step: 10.0
time_stepping_type: fixed
time_step_count: 0
second_order_accuracy: no
realms:
- realm_1
Nalu-Wind input file contains the following top-level sections that describe the simulation to be executed.
Realms
Realms describe the computational domain (via mesh input files) and the set of physics equations (Low-Mach Navier-Stokes, Heat Conduction, etc.) that are solved over this particular domain. The list can contain multiple computational domains (realms) that use different meshes as well as solve different sets of physics equations and interact via solution transfer. This section also contains information regarding the initial and boundary conditions, solution output and restart options, the linear solvers used to solve the linear system of equations, and solution options that govern the discretization of the equation set.
A special case of a realm instance is the input-output realm; this realm type does not solve any physics equations, but instead serves one of the following purposes:
provide time-varying boundary conditions to one or more boundaries within one or more of the participating realms in the simulations. In this context, it acts as an input realm.
extract a subset of data for output at a different frequency from the other realms. In this context, it acts as an output realm.
Inclusion of an input/output realm will require the user to provide the additional transfers section in the Nalu-Wind input file that defines the solution fields that are transferred between the realms. See Physics Realm Options for detailed documentation on all Realm options.
Linear Solvers
This section configures the solvers and preconditioners used to solve the resulting linear system of equations within Nalu-Wind. The linear system convergence tolerance and other controls are set here and can be used with multiple systems across different realms. See Linear Solvers for more details.
Time Integrators
This section configures the time integration scheme used (first/second order in time), the duration of simulation, fixed or adaptive timestepping based on Courant number constraints, etc. Each time integration section in this list can accept one or more realms that are integrated in time using that specific time integration scheme. See Time Integration Options for complete documentation of all time integration options available in Nalu-Wind.
Transfers
An optional section that defines one or more solution transfer definitions between the participating realms during the simulation. Each transfer definition provides a mapping of the to and from realm, part, and the solution field that must be transferred at every timestep during the simulation. See ABL Forcing section for complete documentation of all transfer options available in Nalu-Wind.
Simulations
Simulations provides the top-level architecture that orchestrates the time-stepping across all the realms and the required equation sets.
Linear Solvers
The linear_solvers section contains a list of one or more linear solver
settings that specify the solver, preconditioner, convergence tolerance for
solving a linear system. Every entry in the YAML list will contain the following
entries:
Note
The variable in the linear_solvers subsection are prefixed with
linear_solvers.name but only the variable name after the period should
appear in the input file.
- linear_solvers.name
The key used to refer to the linear solver configuration in equation_systems.solver_system_specification section.
- linear_solvers.type
The type of solver library used.
Type
Description
tpetraTpetra data structures and Belos solvers/preconditioners
hypreHypre data structures and Hypre solver/preconditioners
- linear_solvers.method
The solver used for solving the linear system.
When linear_solvers.type is
tpetrathe valid options are:gmres,biCgStab,cg. Forhyprethe valid options arehypre_boomerAMGandhypre_gmres.
Options Common to both Solver Libraries
- linear_solvers.preconditioner
The type of preconditioner used.
When linear_solvers.type is
tpetrathe valid options aresgs,mt_sgs,muelu. Forhyprethe valid options areboomerAMGornone.
- linear_solvers.tolerance
The relative tolerance used to determine convergence of the linear system.
- linear_solvers.max_iterations
Maximum number of linear solver iterations performed.
- linear_solvers.kspace
The Krylov vector space.
- linear_solvers.output_level
Verbosity of output from the linear solver during execution.
- linear_solvers.write_matrix_files
A boolean flag indicating whether the matrix, the right hand side, and the solution vector are written to files during execution. The matrix files are written in MatrixMarket format. The default value is
no.
Additional parameters for Belos Solver/Preconditioners
- linear_solvers.muelu_xml_file_name
Only used when the linear_solvers.preconditioner is set to
mueluand specifies the path to the XML filename that contains various configuration parameters for Trilinos MueLu package.
- linear_solvers.recompute_preconditioner
A boolean flag indicating whether preconditioner is recomputed during runs. The default value is
yes.
- linear_solvers.reuse_preconditioner
Boolean flag. Default value is
no.
- linear_solvers.summarize_muelu_timer
Boolean flag indicating whether MueLu timer summary is printed. Default value is
no.
Additional parameters for Hypre Solver/Preconditioners
The user is referred to Hypre Reference Manual for full details on the usage of the parameters described briefly below.
The parameters that start with bamg_ prefix refer to options related to
Hypre’s BoomerAMG preconditioner.
- linear_solvers.bamg_output_level
The level of verbosity of BoomerAMG preconditioner. See
HYPRE_BoomerAMGSetPrintLevel. Default: 0.
- linear_solvers.bamg_coarsen_type
See
HYPRE_BoomerAMGSetCoarsenType. Default: 6
- linear_solvers.bamg_cycle_type
See
HYPRE_BoomerAMGSetCycleType. Default: 1
- linear_solvers.bamg_relax_type
See
HYPRE_BoomerAMGSetRelaxType. Default: 6
- linear_solvers.bamg_relax_order
See
HYPRE_BoomerAMGSetRelaxOrder. Default: 1
- linear_solvers.bamg_num_sweeps
See
HYPRE_BoomerAMGSetNumSweeps. Default: 2
- linear_solvers.bamg_max_levels
See
HYPRE_BoomerAMGSetMaxLevels. Default: 20
- linear_solvers.bamg_strong_threshold
See
HYPRE_BoomerAMGSetStrongThreshold. Default: 0.25
Time Integration Options
- Time_Integrators
A list of time-integration options used to advance the realms in time. Each list entry must contain a YAML mapping with the key indicating the type of time integrator. Currently only one option,
StandardTimeIntegratoris available.Time_Integrators: - StandardTimeIntegrator: name: ti_1 start_time: 0.0 termination_step_count: 10 time_step: 0.5 time_stepping_type: fixed time_step_count: 0 second_order_accuracy: yes realms: - fluids_realm
- time_int.name
The lookup key for this time integration entry. This name must match the one provided in Simulations section.
- time_int.termination_time
Nalu-Wind will stop the simulation once the
termination_timehas reached.
- time_int.termination_step_count
Nalu-Wind will stop the simulation once the specified
termination_step_counttimesteps have been completed. If both time_int.termination_time and this parameter are provided then this parameter will prevail.
- time_int.time_step
The time step (\(\Delta t\)) used for the simulation. If time_int.time_stepping_type is
fixedthis value does not change during the simulation.
- time_int.start_time
The starting time step (default:
0.0) when starting a new simulation. Note that this has no effect on restart which is controlled by restart.restart_time in therestartsection.
- time_int.time_step_count
The starting timestep counter for a new simulation. See restart for restarting from a previous simulation.
- time_int.second_order_accuracy
A boolean flag indicating whether second-order time integration scheme is activated. Default:
no.
- time_int.time_stepping_type
One of
fixedoradaptiveindicating whether a fixed time-stepping scheme or an adaptive timestepping scheme is used for simulations. See time_step_control for more information on max Courant number based adaptive time stepping.
- time_int.realms
A list of realms names. The names entered here must match name used in the realms section. Names listed here not found in realms list will trigger an error, while realms not included in this list but present in realms will not be initialized and silently ignored. This can cause the code to abort if the user attempts to access the specific realm in the transfers section.
Physics Realm Options
As mentioned previously, realms is a YAML list data structure containing at least one Physics Realm Options entry that defines the computational domain (provided as an Exodus-II mesh), the set of physics equations that must be solved over this domain, along with the necessary initial and boundary conditions. Each list entry is a YAML dictionary mapping that is described in this section of the manual. The key subsections of a Realm entry in the input file are
Realm subsection |
Purpose |
|---|---|
equation_systems |
Set of physics equations to be solved |
initial_conditions |
Initial conditions for the various fields |
boundary_conditions |
Boundary condition for the different fields |
material_properties |
Material properties (e.g., fluid density, viscosity etc.) |
solution_options |
Discretization and numerical stability |
mesh_transformation |
Mesh transformation |
mesh_motion |
Mesh motion |
output |
Solution output options (file, frequency, etc.) |
restart |
Optional: Restart options (restart time, checkpoint frequency etc.) |
time_step_control |
Optional: Parameters determining variable timestepping |
In addition to the sections mentioned in the table, there are several additional sections that could be present depending on the specific simulation type and post-processing options requested by the user. A brief description of these optional sections are provided below:
Realm subsection |
Purpose |
|---|---|
turbulence_averaging |
Generate statistics for the flow field |
post_processing |
Extract integrated data from the simulation |
solution_norm |
Compare the solution error to a reference solution |
data_probes |
Extract data using probes |
actuator |
Model turbine blades/tower using actuator lines |
abl_forcing |
Momentum source term to drive ABL flows to a desired velocity profile |
boundary_layer_statistics |
Compute boundary layer statistics |
Common options
- name
The name of the realm. The name provided here is used in the Time_Integrators section to determine the time-integration scheme used for this computational domain.
- mesh
The name of the Exodus-II mesh file that defines the computational domain for this realm. Note that only the base name (i.e., without the
.NPROCS.IPROCsuffix) is provided even for simulations using previously decomposed mesh/restart files.
- automatic_decomposition_type
Used only for parallel runs, this indicates how the a single mesh database must be decomposed amongst the MPI processes during initialization. This option should not be used if the mesh has already been decomposed by an external utility. Possible values are:
Value
Description
rcb
recursive coordinate bisection
rib
recursive inertial bisection
linear
elements in order first n/p to proc 0, next to proc 1.
cyclic
elements handed out to id % proc_count
- activate_aura
A boolean flag indicating whether an extra element is ghosted across the processor boundaries. The default value is
no.
- use_edges
A boolean flag indicating whether edge based discretization scheme is used instead of element based schemes. The default value is
no.
- polynomial_order
An integer value indicating the polynomial order used for higher-order mesh simulations. The default value is
1. When polynomial_order is greater than 1, the Realm has the capability to promote the mesh to higher-order during initialization.
- solve_frequency
An integer value indicating how often this realm is solved during time integration. The default value is
1.
- support_inconsistent_multi_state_restart
A boolean flag indicating whether restarts are allowed from files where the necessary field states are missing. A typical situation is when the simulation is restarted using second-order time integration but the restart file was created using first-order time integration scheme.
- activate_memory_diagnostic
A boolean flag indicating whether memory diagnostics are activated during simulation. Default value is
no.
- rebalance_mesh
A boolean flag indicating whether to rebalance mesh using stk_balance. The default value is
no. If this parameter is activated, it requires thatstk_rebalance_methodis also set to specify the decomposition method to be used for rebalance, e.g., RIB, RCB, etc.
- balance_nodes
A boolean flag indicating whether node balancing is performed during simulations. See also balance_node_iterations and balance_nodes_target.
- balance_node_iterations
The frequency at which node rebalancing is performed. Default value is
5.
- balance_node_target
The target balance ratio. Default value is
1.0.
Equation Systems
- equation_systems
equation_systemssubsection defines the physics equation sets that are solved for this realm and the linear solvers used to solve the different linear systems.
Note
The variable in the equation_systems subsection are prefixed with
equation_systems.name but only the variable name after the period should
appear in the input file.
- equation_systems.name
A string indicating the name used in log messages etc.
- equation_systems.max_iterations
The maximum number of non-linear iterations performed during a timestep that couples the different equation systems.
- equation_systems.solver_system_specification
A mapping containing
field_name: linear_solver_namethat determines the linear solver used for solving the linear system. Example:solver_system_specification: pressure: solve_continuity enthalpy: solve_scalar velocity: solve_scalar
The above example indicates that the linear systems for the enthalpy and momentum (velocity) equations are solved by the linear solver corresponding to the tag
solve_scalarin the linear_systems entry, whereas the continuity equation system (pressure Poisson solve) should be solved using the linear solver definition corresponding to the tagsolve_continuity.
- equation_systems.systems
A list of equation systems to be solved within this realm. Each entry is a YAML mapping with the key corresponding to a pre-defined equation system name that contains additional parameters governing the solution of this equation set. The predefined equation types are
Equation system
Description
LowMachEOM
Low-Mach Momentum and Continuity equations
Enthalpy
Energy equations
ShearStressTransport
\(k-\omega\) SST equation set
TurbKineticEnergy
TKE equation system
MassFraction
Mass Fraction
MixtureFraction
Mixture Fraction
MeshDisplacement
Arbitrary Mesh Displacement
An example of the equation system definition for ABL precursor simulations is shown below:
# Equation systems example for ABL precursor simulations systems: - LowMachEOM: name: myLowMach max_iterations: 1 convergence_tolerance: 1.0e-5 - TurbKineticEnergy: name: myTke max_iterations: 1 convergence_tolerance: 1.0e-2 - Enthalpy: name: myEnth max_iterations: 1 convergence_tolerance: 1.0e-2
Initial conditions
- initial_conditions
The
initial_conditionssub-sections defines the conditions used to initialize the computational fields if they are not provided via the mesh file. Two types of field initializations are currently possible:constant- Initialize the field with a constant value throughout the domain;user_function- Initialize the field with a pre-defined user function.
The snippet below shows an example of both options available to initialize the various computational fields used for ABL simulations. In this example, the pressure and turbulent kinetic energy fields are initialized using a constant value, whereas the velocity field is initialized by the user function
boundary_layer_perturbationthat imposes sinusoidal fluctations over a velocity field to trip the flow.initial_conditions: - constant: ic_1 target_name: [fluid_part] value: pressure: 0.0 turbulent_ke: 0.1 - user_function: ic_2 target_name: [fluid_part] user_function_name: velocity: boundary_layer_perturbation user_function_parameters: velocity: [1.0,0.0075398,0.0075398,50.0,8.0]
- initial_conditions.constant
This input parameter serves two purposes: 1. it indicates the type (
constant), and 2. provides the custom name for this condition. In addition to the initial_conditions.target_name this section requires another entryvaluethat contains the mapping of(field_name, value)as shown in the above example.
- initial_conditions.user_function
Indicates that this block of YAML input must be parsed as input for a user defined function.
- initial_conditions.target_name
A list of element blocks (parts) where this initial condition must be applied. Using the alias
all_blocksis equivalent to listing all element blocks in the mesh.
Boundary Conditions
- boundary_conditions
This subsection of the physics Realm contains a list of boundary conditions that must be used during the simulation. Each entry of this list is a YAML mapping entry with the key of the form
<type>_boundary_conditionwhere the available types are:inflowopen– Outflow BCwallsymmetryperiodicnon_conformal– e.g., BC across sliding mesh interfacesoverset– overset mesh assembly description
All BC types require bc.target_name that contains a list of side sets
where the specified BC is to be applied. Additional information necessary for
certain BC types are provided by a sub-dictionary with the key
<type>_user_data: that contains the parameters necessary to initialize a
specific BC type.
- bc.target_name
A list of side set part names where the given BC type must be applied. If a single string value is provided, it is converted to a list internally during input file processing phase.
Inflow Boundary Condition
- inflow_boundary_condition: bc_inflow
target_name: inlet
inflow_user_data:
velocity: [0.0,0.0,1.0]
Open Boundary Condition
- open_boundary_condition: bc_open
target_name: outlet
open_user_data:
velocity: [0,0,0]
pressure: 0.0
entrainment_method: {computed, specified}
total_pressure: {yes, no}
Wall Boundary Condition
- bc.wall_user_data
This subsection contains specifications as to whether wall models are used, or how to treat the velocity at the wall when there is mesh motion.
The following input file snippet shows an example of using an ABL wall function at the terrain during ABL simulations. See ABL Wall Function for more details on the actual implementation.
# Wall boundary condition example for ABL terrain modeling
- wall_boundary_condition: bc_terrain
target_name: terrain
wall_user_data:
velocity: [0,0,0]
use_abl_wall_function: yes
heat_flux: 0.0
roughness_height: 0.2
gravity_vector_component: 3
reference_temperature: 300.0
The entry gravity_vector_component is an integer that specifies the component of the gravity vector, defined in solution_options.gravity, that should be used in the definition of the Monin-Obukhov length scale calculation. The entry reference_temperature is the reference temperature used in calculation of the Monin-Obukhov length scale.
When there is mesh motion involved the wall boundary velocity takes the value of the mesh_velocity along the part represented by bc.target_name. In such a scenario all information under bc.wall_user_data is rendered unused.
Example of wall boundary with a custom user function for temperature at the wall
- wall_boundary_condition: bc_6
target_name: surface_6
wall_user_data:
user_function_name:
temperature: steady_2d_thermal
Symmetry Boundary Condition
Requires no additional input other than bc.target_name.
- symmetry_boundary_condition: bc_top
target_name: top
symmetry_user_data:
Periodic Boundary Condition
Unlike the other BCs described so far, the parameter bc.target_name behaves differently for the periodic BC. This parameter must be a list containing exactly two entries: the boundary face pair where periodicity is enforced. The nodes on these planes must coincide after translation in the direction of periodicity. This BC also requires a periodic_user_data section that specifies the search tolerance for locating node pairs.
- periodic_user_data
- periodic_boundary_condition: bc_east_west target_name: [east, west] periodic_user_data: search_tolerance: 0.0001
Non-Conformal Boundary
Like the periodic BC, the parameter bc.target_name must be a list with exactly two entries that specify the boundary plane pair forming the non-conformal boundary.
- non_conformal_boundary_condition: bc_left
target_name: [surface_77, surface_7]
non_conformal_user_data:
expand_box_percentage: 10.0
Material Properties
- material_properties
The section provides the properties required for various physical quantities during the simulation. A sample section used for simulating ABL flows is shown below
material_properties: target_name: [fluid_part] constant_specification: universal_gas_constant: 8314.4621 reference_pressure: 101325.0 reference_quantities: - species_name: Air mw: 29.0 mass_fraction: 1.0 specifications: - name: density type: constant value: 1.178037722969475 - name: viscosity type: constant value: 1.6e-5 - name: specific_heat type: constant value: 1000.0
- material_properties.target_name
A list of element blocks (parts) where the material properties are applied. This list should ideally include all the parts that are referenced by initial_conditions.target_name. Using the alias
all_blocksis equivalent to listing all element blocks in the mesh.
- material_properties.constant_specification
Values for several constants used during the simulation. Currently the following properties are defined:
Name
Description
universal_gas_constantIdeal gas constant \(R\)
reference_temperatureReference temperature for simulations
reference_pressureReference pressure for simulations
- material_properties.reference_quantities
Provides material properties for the different species involved in the simulation.
Name
Description
species_nameName used to lookup properties
mwMolecular weight
mass_fractionMass fraction
primary_mass_fractionsecondary_mass_fractionstoichiometry
- material_properties.specifications
A list of material properties with the following parameters
- material_properties.specifications.name
The name used for lookup, e.g.,
density,viscosity, etc.
- material_properties.specifications.type
The type can be one of the following
Type
Description
constantConstant value property
polynomialProperty determined by a polynomial function
ideal_gas_tFunction of \(T_\mathrm{ref}\), \(P_\mathrm{ref}\), molecular weight
ideal_gas_t_pFunction of \(T_\mathrm{ref}\), pressure, molecular weight
ideal_gas_ykhdf5tableLookup from an HDF5 table
mixture_fractionProperty determined by the mixture fraction
geometricgenericExamples
Specification for density as a function of temperature
specifications: - name: density type: ideal_gas_t
Specification of viscosity as a function of temperature
- name: viscosity type: polynomial coefficient_declaration: - species_name: Air coefficients: [1.7894e-5, 273.11, 110.56]
The
species_namemust correspond to the entry in reference quantitites <material_properties.reference_quantities> to lookup molecular weight information.Specification via
hdf5tablematerial_properties: table_file_name: SLFM_CGauss_C2H4_ZMean_ZScaledVarianceMean_logChiMean.h5 specifications: - name: density type: hdf5table independent_variable_set: [mixture_fraction, scalar_variance, scalar_dissipation] table_name_for_property: density table_name_for_independent_variable_set: [ZMean, ZScaledVarianceMean, ChiMean] aux_variables: temperature table_name_for_aux_variables: temperature - name: viscosity type: hdf5table independent_variable_set: [mixture_fraction, scalar_variance, scalar_dissipation] table_name_for_property: mu table_name_for_independent_variable_set: [ZMean, ZScaledVarianceMean, ChiMean]
Specification via
mixture_fractionmaterial_properties: target_name: block_1 specifications: - name: density type: mixture_fraction primary_value: 0.163e-3 secondary_value: 1.18e-3 - name: viscosity type: mixture_fraction primary_value: 1.967e-4 secondary_value: 1.85e-4
Solution Options
Note
The documentation for this section is incomplete.
- solution_options
This section defines the discretization and numerical stability approaches, as well as turbulence models.
- solution_options.name
Name of solution options group.
- solution_options.turbulence_model
Turbulence model used in simulation.
- solution_options.options
This subsection defines additional options for the solution options.
For example, one could modify turbulence model constants:
- turbulence_model_constants: SDRWallFactor: 0.625
One could also define source terms, such as a momentum forcing in a box of the domain:
- source_terms: momentum: body_force_box - source_term_parameters: momentum: [0.011, 0.0, 0.0] momentum_box: [-1.0, 1.00001, 0.0, 10.0, 4.0, 5.0]
One can make the momentum forcing in a box dynamic to achieve a target velocity on a face:
- dynamic_body_force_box_parameters: forcing_direction: 0 velocity_reference: 21.0 density_reference: 1.0 velocity_target_name: inlet drag_target_name: [top, bottom] output_file_name: forcing.dat
Mesh Transformation
- mesh_transformation
This subsection of the realm describes a one time stationary motion undergone by the entire mesh with entries under mesh_transformation describing the motions applied to different parts in a.
Example:
mesh_transformation: - name: scale_background mesh_parts: [ Unspecified-3-HEX ] motion: - type: scaling factor: [1.2, 1.0, 1.2] origin: [5.0, 0.05, 0.0] - name: scale_near_body mesh_parts: [ Unspecified-2-HEX ] motion: - type: scaling factor: [1.2, 1.0, 1.2] origin: [0.0, 0.05, 0.0]
- mesh_transformation.name
Name of motion group.
- mesh_transformation.mesh_parts
Mesh parts associated with respective motion group. The user may use
all_blocksto apply the transformation to the entire mesh.
- mesh_transformation.motion
Type of motion. Every group is free to undergo one or multiple motions simultaneously.
Mesh Motion
- mesh_motion
This subsection of the of the realm describes the time-dependent rigid body motion undergone by the entire mesh for as described by entries under mesh_motion.
Example:
mesh_motion: - name: trans_rot_near_body mesh_parts: [ Unspecified-2-HEX ] motion: - type: rotation omega: 12.0 axis: [0.0, 1.0, 0.0] origin: [0.0, 0.05, 0.0] - type: translation start_time: 100.0 end_time: 200.0 velocity: [0.05, 0.0, 0.0]
- mesh_motion.name
Name of motion group.
- mesh_motion.mesh_parts
Mesh parts associated with respective motion group. The user may use
all_blocksto apply the motion to the entire mesh.
- mesh_motion.motion
Type of motion the current group undergoes. Every frame is free to undergo one or multiple motions simultaneously.
Output Options
- output
Specifies the frequency of output, the output database name, etc.
Example:
output: output_data_base_name: out/ABL.neutral.e output_frequency: 100 output_node_set: no output_variables: - velocity - pressure - temperature
- output.output_data_base_name
The name of the output Exodus-II database. Can specify a directory relative to the run directory, e.g.,
out/nalu_results.e. The directory will be created automatically if one doesn’t exist. Default:output.e
- output.output_frequency
Nalu-Wind will write the output file every
output_frequencytimesteps. Note that currently there is no option to output results at a specified simulation time. Default:1.
- output.output_start
Nalu-Wind will start writing output past the
output_starttimestep. Default:0.
- output.output_forced_wall_time
Force output at a specified wall-clock time in seconds.
- output.output_node_set
Boolean flag indicating whether nodesets, if present, should be output to the output file along with element blocks.
- output.compression_level
Integer value indicating the compression level used. Default:
0.
- output.output_variables
A list of field names to be output to the database. The field variables can be node or element based quantities.
Restart Options
- restart
This section manages the restart for this realm object.
- restart.restart_data_base_name
The filename for restart. Like output, the filename can contain a directory and it will be created if not already present.
- restart.restart_time
If this variable is present, it indicates that the current run will restart from a previous simulation. This requires that the mesh be a restart file with all the fields necessary for the equation sets defined in the equation_systems.systems. Nalu-Wind will restart from the closest time available in the mesh to
restart_time. The timesteps available in a restart file can be examined by looking at thetime_wholevariable using thencdumputility.Note
The restart database used for restarting a simulation is the mesh parameter. The
restart_data_base_nameparameter is used exclusively for outputs.
- restart.restart_frequency
The frequency at which restart files are written to the disk. Default:
500timesteps.
- restart.restart_start
Nalu-Wind will write a restart file after
restart_starttimesteps have elapsed.
- restart.restart_forced_wall_time
Force writing of restart file after specified wall-clock time in seconds.
- restart.restart_node_set
A boolean flag indicating whether nodesets are output to the restart database.
- restart.max_data_base_step_size
Default:
100,000.
- restart.compression_level
Compression level. Default:
0.
Time-step Control Options
- time_step_control
This optional section specifies the adpative time stepping parameters used if time_int.time_stepping_type is set to
adaptive.time_step_control: target_courant: 2.0 time_step_change_factor: 1.2
- dtctrl.target_courant
Maximum Courant number allowed during the simulation. Default:
1.0
- dtctrl.time_step_change_factor
Maximum allowable increase in
dtover a given timestep.
Turbine specific input options
Actuator Turbine Model
- actuator
actuatorsubsection defines the inputs for actuator line simulations. A sample section is shown below for running actuator line simulations coupled to OpenFAST with two turbines.
actuator:
type: ActLineFAST
search_method: stk_kdtree
search_target_part: Unspecified-2-HEX
n_turbines_glob: 2
dry_run: False
debug: False
t_start: 0.0
simStart: init # init/trueRestart/restartDriverInitFAST
t_max: 5.0
n_every_checkpoint: 100
Turbine0:
procNo: 0
num_force_pts_blade: 50
num_force_pts_tower: 20
nacelle_cd: 1.0
nacelle_area: 1.0
air_density: 1.225
epsilon: [ 5.0, 5.0, 5.0 ]
turbine_base_pos: [ 0.0, 0.0, -90.0 ]
turbine_hub_pos: [ 0.0, 0.0, 0.0 ]
restart_filename: ""
FAST_input_filename: "Test01.fst"
turb_id: 1
turbine_name: machine_zero
Turbine1:
procNo: 0
num_force_pts_blade: 50
num_force_pts_tower: 20
nacelle_cd: 1.0
nacelle_area: 1.0
air_density: 1.225
epsilon: [ 5.0, 5.0, 5.0 ]
turbine_base_pos: [ 250.0, 0.0, -90.0 ]
turbine_hub_pos: [ 250.0, 0.0, 0.0 ]
restart_filename: ""
FAST_input_filename: "Test02.fst"
turb_id: 2
turbine_name: machine_one
- actuator.type
Type of actuator source. Options are
ActLineFASTandActDiskFAST.ActLineFASTis for actuator lines, andActDiskFASTis for actuator disks. The actuator disk uses a stationary actuator line model to compute forces at the blade locations and then the average force of the blades is spread azimuthally between the blades sampling points.
- actuator.search_method
String specifying the type of search method used to identify the nodes within the search radius of the actuator points. The only valid option is
stk_kdtree. Theboost_rtreeoption has been deprecated by the STK search library.
- search_target_part
String or an array of strings specifying the parts of the mesh to be searched to identify the nodes near the actuator points.
- actuator.n_turbines_glob
Total number of turbines in the simulation. The input file must contain a number of turbine specific sections (Turbine0, Turbine1, …, Turbine(n-1)) that is consistent with nTurbinesGlob.
- actuator.debug
Enable debug outputs if set to true
- actuator.dry_run
The simulation will not run if dryRun is set to true. However, the simulation will read the input files, allocate turbines to processors and prepare to run the individual turbine instances. This flag is useful to test the setup of the simulation before running it.
- actuator.simStart
Flag indicating whether the simulation starts from scratch or restart.
simStarttakes on one of three values:init- Use this option when starting a simulation from t=0s.trueRestart- While OpenFAST allows for restart of a turbine simulation, external components like the Bladed style controller may not. Use this option when all components of the simulation are known to restart.restartDriverInitFAST- When therestartDriverInitFASToption is selected, the individual turbine models start from t=0s and run up to the specified restart time using the inflow data stored at the actuator nodes from a hdf5 file. The C++ API stores the inflow data at the actuator nodes in a hdf5 file at every OpenFAST time step and then reads it back when using this restart option. This restart option is especially useful when the glue code is a CFD solver.
- actuator.t_start
Start time of the simulation
- actuator.t_end
End time of the simulation.
t_end<=t_max
- actuator.t_max
Max time of the simulation
Note
t_max can only be set when OpenFAST is running from t=0s and simStart is init. t_max can not be changed on a restart. OpenFAST will not be able to run beyond t_max. Choose t_max to be large enough to accomodate any possible future extensions of runs. One can change t_start and t_end to start and stop the simulation any number of times as long as t_end <= t_max.
- actuator.dt_fast
Time step for OpenFAST. All turbines should have the same time step.
- actuator.n_every_checkpoint
Restart files will be written every so many time steps
Turbine specific input options
- actuator.turbine_base_pos
The position of the turbine base for actuator-line/disk simulations
- actuator.num_force_pts_blade
The number of actuator points along each blade for actuator-line/disk simulations
- actuator.num_force_pts_tower
The number of actuator points along the tower for actuator-line/disk simulations.
- actuator.nacelle_cd
The drag coefficient for the nacelle. If this is set to zero, or not defined, the code will not implement the nacelle model.
- actuator.nacelle_area
The reference area for the nacelle. This is only used if the nacelle model is used.
- actuator.air_density
The air density. This is only used to compute the nacelle force. It should match the density being used in both Nalu and OpenFAST.
- actuator.epsilon
The spreading width \(\epsilon\) in the Gaussian spreading function in the [chordwise, thickness, spanwise] coordinate system to spread the forces from the actuator point to the nodes. In the case of the actuator disk, only the first value in the chordwise direction is used for the uniform isotropic Gaussian.
- actuator.epsilon_chord
This is the ratio \(\epsilon/c\) in every direction [chordwise, thickness, spanwise]. If this option is specified, the code will choose a value of \(\epsilon\) at every location that is \(c * \epsilon/c\). To avoid numerical instabilities, the code will choose the maximum value between \(c * \epsilon/c\) and the value of
actuator.epsilon_minspecified.
- actuator.epsilon_min
This is the minimum value of \(\epsilon\) in the Gaussian spreading function in the [chordwise, thickness, spanwise] coordinate system to spread the forces from the actuator point to the nodes. This option is required if the option
actuator.epsilon_chordis specified.
- actuator.epsilon_tower
The spreading width \(\epsilon\) in the Gaussian spreading function in the inertial [x, y, z] reference frame. If this value is not speficied, then
actuator.epsilonoractuator.epsilon_minwill be used.
- actuator.restart_filename
The checkpoint file for this turbine when restarting a simulation
- actuator.FAST_input_filename
The FAST input file for this turbine
- actuator.turb_id
A unique turbine id for each turbine
- actuator.num_swept_pts
This is an optional parameter specifically for actuator disks. This parameter determines the number of points that are placed azimuthally between the actuator lines and spread the forcing over the disk’s area. When
num_swept_ptsis included the number of azimuthal points between the lines is forced to this value at all radial locations. Ifnum_swept_ptsis omitted then the azimuthal sampling is computed automatically with different sampling at each radial location such that the average distance between points matches the radial spacing.
Fluid-Structure Interaction
- openfast_fsi
The
openfast_fsisubsection defines parameters used when coupling with openfast for FSI simulations. A sample section is shown below.openfast_fsi: n_turbines_glob: 1 debug: False sim_start: trueRestart t_start: 4.958677685950414 t_max: 600.55 n_checkpoint: 1440 dt_FAST: 0.0008608815426997245 Turbine0: turbine_base_pos: [1800, 1800, 0] turbine_hub_pos: [1795, 1800, 90] restart_filename: "nrel5mw.5760" sim_type: "ext-loads" blade_parts: - ["blade1-HEX"] - ["blade2-HEX"] - ["blade3-HEX"] blade_boundary_parts: - ["blade1"] - ["blade2"] - ["blade3"] az_blend_mean: 18.84955592 # radians az_blend_delta: 1.570796327 # radians vel_mean: 11.4 wind_dir: 240.0 # degrees z_ref: 90.0 shear_exp: 0.0 deflection_ramping: enable_temporal_ramping: true enable_theta_ramping: false enable_span_ramping: false span_ramp_distance: 4.0 temporal_ramp_start: 0.0 temporal_ramp_end: 0.5 theta_ramp_span: 30.0 # degrees zero_theta_ramp_angle: 58.0 # degrees
- n_turbines_glob
An integer indicating the total number of turbines to be used with FSI.
- debug
A boolean flag that controls additional checks and printing of additional information, which is helpful when troubleshooting a simulation.
- sim_start
String indicating how OpenFAST should start. For FSI simulations, we suggest that the user set this to
trueRestart(no quotes).
- t_start
The start time of the FSI simulation. This should be an integer multiple of
dt_FAST, and should matcht_endin the OpenFAST driver file. Note that OpenFAST and Nalu-Wind record time differently, so this variable will not necessarily fit with the parameters in theTime_Integratorssection.
- t_max
The FSI simulation will end if the simulation time exceeds this value.
- n_checkpoint
An integer indicating the frequency with which checkpoint files will be written. That is, a checkpoint will be written every
n_checkpointtimesteps. Commonly this is set to correspond to the number of steps in one rotor revolution.
- dt_FAST
The timestep used by OpenFAST for the FSI simulation. This should match
DTin the OpenFAST input file (with extension .fst). Commonly, this is 1/4 of the driver/Nalu/AMR-Wind timestep.
- turbine_name
This subsection includes parameters for a particular turbine. Any name may be provided by the user. In the above example, the name
Turbine0was provided. In the following, any variable appearing in this subsection will be denotedturbine_name.variable_namefor clarity, but only the variable name should be included in the input file.
- turbine_name.turbine_base_pos
Real vector indicating the location of the base of the tower. This should match the variable with the same name in the OpenFAST driver input file (with extension .yaml).
- turbine_name.turbine_hub_pos
Real vector indicating the location of the hub. This should match the variable with the same name in the OpenFAST driver input file (with extension .yaml). Note that any height change due to rotor tilt should be included in this variable, but the effect of yaw should not be included.
- turbine_name.restart_filename
String indicating the OpenFAST checkpoint file that the FSI simulation will start from. Do not include the extension (.chkp). This variable will have the format
"name.integer", where theintegeris the number of steps taken in the OpenFAST standalone simulation. This should be equal tot_enddivided bydt_FASTfrom the OpenFAST standalone run.
- turbine_name.sim_type
String indicating the type of OpenFAST simulation. For FSI simulations, this should always be set to
"ext-loads".
- turbine_name.blade_parts
List of strings indicating the mesh element blocks corresponding to each of the blades.
- turbine_name.tower_parts
List of strings indicating the mesh element blocks corresponding to the tower.
- turbine_name.blade_boundary_parts
List of strings indicating the mesh sidesets corresponding to the wall boundaries of each of the blades.
- turbine_name.tower_boundary_parts
List of strings indicating the mesh sidesets corresponding to the wall boundaries of the tower.
- turbine_name.az_blend_mean
Real variable (in radians) indicating the mean angular position for the load blending. The loads provided to BeamDyn are a weighted average of the loads provided by AeroDyn and the true CFD loads provided by Nalu-Wind during startup to help with stability while the CFD flow field develops around the turbine structure. The weight of the Nalu-Wind contribution takes the form \(\frac{1}{2} \left[1+\text{tanh}\left(\left(\phi-\phi_\text{mean}\right)/\phi_\text{delta}\right)\right]\), where \(\phi\) is the angle that the turbine has rotated through (including any initial OpenFAST runs), \(\phi_\text{mean}\) is the value of
az_blend_mean, and \(\phi_\text{delta}\) is the value ofaz_blend_delta.
- turbine_name.az_blend_delta
Real variable (in radians) indicating the width for load blending. See the entry for
az_blend_meanabove for a complete definition.
- turbine_name.vel_mean
Real variable indicating the mean wind speed at height
z_ref. This should correspond to the variable with the same name in the OpenFAST driver input file (with extension .yaml).
- turbine_name.wind_dir
Real variable indicating the angle of the incoming wind in degrees. The direction the wind is heading is measured clockwise from South. For example, wind heading South is 0 degrees, and wind heading East is 270 degrees. By convention, the x-axis points East, and the y-axis points North. This should match the variable with the same name in the OpenFAST driver input file (with extension .yaml). If the turbine is intended to be aligned with the flow, the
NacYawvariable found in the OpenFAST Elastodyn file should be 270 degrees minuswind_dir. For example, if the wind is heading East,NacYawwill be 0 degrees.
- turbine_name.z_ref
Real variable indicating the reference height at which
vel_meanandwind_dirapply. Often corresponds to the hub height of the turbine.
- turbine_name.shear_exp
Real variable indicating the exponent used in a power-law approximation of the incoming ABL. This variable should match the variable with the same name in the OpenFAST driver input file (with extension .yaml).
- turbine_name.deflection_ramping
The
deflection_rampingsub-subsection controls the temporal and spatial ramping of blade deflections applied in Nalu-Wind. The temporal ramping enables a smooth transition for the blades from a rigid body motion based on the hub motion to the full blade deflections, and improves the stability of the simulation during startup. The span ramping enables the root section of the blades (which are typically circular) to remain undeformed. The theta ramping improves the quality of the elements near the mesh interface between blades. Note that the total deflection ramping factor will be the product of the temporal, theta, and span ramping factors. This sub-subsection should be provided for each turbine.
- deflection_ramping.enable_temporal_ramping
Boolean variable indicating whether temporal deflection ramping should be used.
- deflection_ramping.enable_theta_ramping
Boolean variable indicating whether spatial deflection ramping with respect to the circumferential direction should be used.
- deflection_ramping.enable_span_ramping
Boolean variable indicating whether spatial deflection ramping with respect to the spanwise direction should be used.
- deflection_ramping.span_ramp_distance
Real variable indicating the distance from the root over which to ramp deflections if
enable_span_rampingis set to true. Distance is measured in the same units as the mesh (meters in most cases).
- deflection_ramping.temporal_ramp_start
Real variable indicating the time at which temporal ramping should begin. Prior to this time, zero blade deflections will be provided. Note that this should correspond to time as recorded by Nalu-Wind and described in the
Time_Integratorssection, not as recorded by OpenFAST. Hence, this will not correspond tot_startabove.
- deflection_ramping.temporal_ramp_end
Real variable indicating the time at which temporal ramping should end. After this time, full blade deflections will be provided. Note that this should correspond to time as recorded by Nalu-Wind and described in the
Time_Integratorssection, not as recorded by OpenFAST.
- deflection_ramping.theta_ramp_span
Real variable (in degrees) indicating the span of the circumferenial sector over which theta ramping is applied. See Figure 1 for an explanation of the theta ramping parameters, where \(\alpha\) is the weight coefficient for the theta ramping. The total deflection ramping is the product of the theta, span, and temporal ramping.
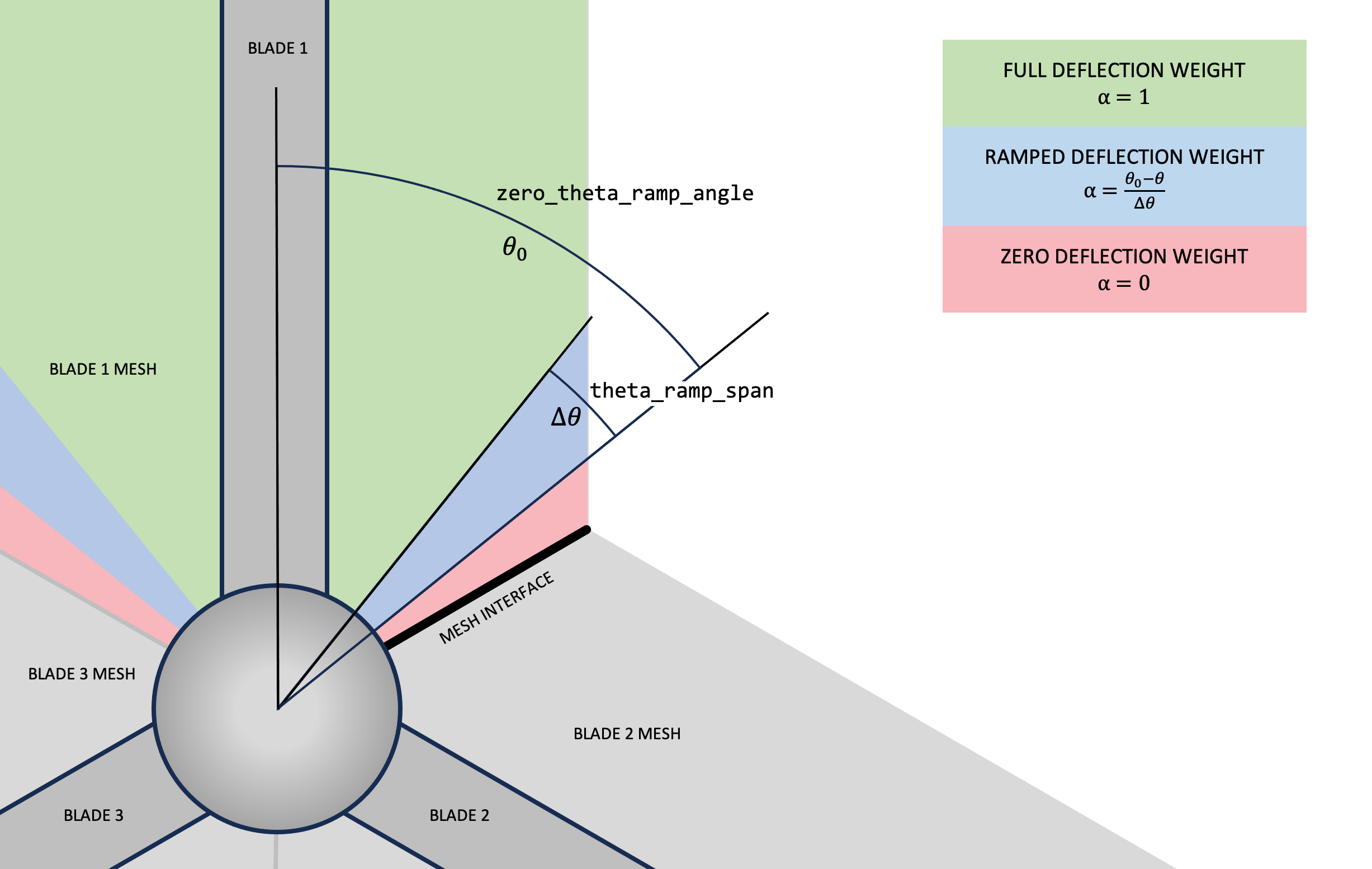
1 Explanation of the theta ramping parameters.
- deflection_ramping.zero_theta_ramp_angle
Real variable (in degrees) indicating the location of the beginning of the circumferential sector over which no deflections are applied, and the end of the sector over which deflections are ramped. See Figure 1 for an explanation of the theta ramping parameters, where \(\alpha\) is the weight coefficient for the theta ramping. The total deflection ramping is the product of the theta, span, and temporal ramping.
Turbulence averaging
- turbulence_averaging
turbulence_averagingsubsection defines the turbulence post-processing quantities and averaging procedures. A sample section is shown belowturbulence_averaging: forced_reset: no time_filter_interval: 100000.0 averaging_type: nalu_classic/moving_exponential specifications: - name: turbulence_postprocessing target_name: interior reynolds_averaged_variables: - velocity favre_averaged_variables: - velocity - resolved_turbulent_ke compute_tke: yes compute_reynolds_stress: yes compute_resolved_stress: yes compute_temperature_resolved_flux: yes compute_sfs_stress: yes compute_temperature_sfs_flux: yes compute_q_criterion: yes compute_vorticity: yes compute_lambda_ci: yes
Note
The variable in the turbulence_averaging subsection are
prefixed with turbulence_averaging.name but only the variable
name after the period should appear in the input file.
- turbulence_averaging.forced_reset
A boolean flag indicating whether the averaging of all quantities in the turbulence averaging section is reset. If this flag is true, the running average is set to zero.
- turbulence_averaging.averaging_type
This parameter sets the choice of the running average type. Possible values are:
nalu_classic“Sawtooth” average. The running average is set to zero each time the time filter width is reached and a new average is calculated for the next time interval.
moving_exponential“Moving window” average where the window size is set to to the time filter width. The contribution of any quantity before the moving window towards the average value reduces exponentially with every time step.
- turbulence_averaging.time_filter_interval
Number indicating the time filter size over which to calculate the running average. This quantity is used in different ways for each filter discussed above.
- turbulence_averaging.specifications
A list of turbulence postprocessing properties with the following parameters
- turbulence_averaging.specifications.name
The name used for lookup and logging.
- turbulence_averaging.specifications.target_name
A list of element blocks (parts) where the turbulence averaging is applied.
- turbulence_averaging.specifications.reynolds_average_variables
A list of field names to be averaged.
- turbulence_averaging.specifications.favre_average_variables
A list of field names to be Favre averaged.
- turbulence_averaging.specifications.compute_tke
A boolean flag indicating whether the turbulent kinetic energy is computed. The default value is
no.
- turbulence_averaging.specifications.compute_reynolds_stress
A boolean flag indicating whether the reynolds stress is computed. The default value is
no.
- turbulence_averaging.specifications.compute_resolved_stress
A boolean flag indicating whether the average resolved stress is computed as \(< \bar\rho \widetilde{u_i} \widetilde{u_j} >\). The default value is
no. When this option is turned on, the Favre average of the resolved velocity, \(< \bar{\rho} \widetilde{u_j} >\), is computed as well.
- turbulence_averaging.specifications.compute_temperature_resolved_flux
A boolean flag indicating whether the average resolved temperature flux is computed as \(< \bar\rho \widetilde{u_i} \widetilde{\theta} >\). The default value is
no. When this option is turned on, the Favre average of the resolved temperature, \(< \bar{\rho} \widetilde{\theta} >\), is computed as well.
- turbulence_averaging.specifications.compute_sfs_stress
A boolean flag indicating whether the average sub-filter scale stress is computed. The default value is
no. The sub-filter scale stress model is assumed to be of an eddy viscosity type and the turbulent viscosity computed by the turbulence model is used. The sub-filter scale kinetic energy is used to determine the isotropic component of the sub-filter stress. As described in the section Conservation of Momentum, the Yoshizawa model is used to compute the sub-filter kinetic energy when it is not transported.
- turbulence_averaging.specifications.compute_temperature_sfs_flux
A boolean flag indicating whether the average sub-filter scale flux of temperature is computed. The default value is
no. The sub-filter scale stress model is assumed to be of an eddy diffusivity type and the turbulent diffusivity computed by the turbulence model is used along with a constant turbulent Prandtl number obtained from the Realm.
- turbulence_averaging.specifications.compute_favre_stress
A boolean flag indicating whether the Favre stress is computed. The default value is
no.
- turbulence_averaging.specifications.compute_favre_tke
A boolean flag indicating whether the Favre stress is computed. The default value is
no.
- turbulence_averaging.specifications.compute_q_criterion
A boolean flag indicating whether the q-criterion is computed. The default value is
no.
- turbulence_averaging.specifications.compute_vorticity
A boolean flag indicating whether the vorticity is computed. The default value is
no.
- turbulence_averaging.specifications.compute_lambda_ci
A boolean flag indicating whether the Lambda2 vorticity criterion is computed. The default value is
no.
Data probes
- data_probes
data_probessubsection defines the data probes. A sample section is shown belowdata_probes: output_frequency: 100 output_format: text search_method: stk_octree search_tolerance: 1.0e-3 search_expansion_factor: 2.0 gzip_level: 0 write_coords: true specifications: - name: probe_bottomwall from_target_part: bottomwall line_of_site_specifications: - name: probe_bottomwall number_of_points: 100 tip_coordinates: [-6.39, 0.0, 0.0] tail_coordinates: [4.0, 0.0, 0.0] output_variables: - field_name: tau_wall field_size: 1 - field_name: pressure specifications: - name: probe_profile from_target_part: interior line_of_site_specifications: - name: probe_profile number_of_points: 100 tip_coordinates: [0, 0.0, 0.0] tail_coordinates: [0.0, 0.0, 1.0] plane_specifications: - name: sample_plane corner_coordinates: [0.0, 0.0, 0.0] edge1_vector: [1.0, 0, 0] edge2_vector: [0, 2.0, 0] edge1_numPoints: 11 edge2_numPoints: 21 offset_vector: [0, 0, 1] offset_spacings: [0, 2] only_output_field: velocity output_variables: - field_name: velocity field_size: 3 - field_name: reynolds_stress field_size: 6
Note
The variable in the data_probes subsection are prefixed
with data_probes.name but only the variable name after the
period should appear in the input file.
- data_probes.output_frequency
Integer specifying the frequency of output.
- data_probes.output_format
String specifying the output format for the data probes. Currently available options are
textorexodus. If not specified, the default is text. Multiple output formats can be specified like the following:output_format: - text - exodus
- data_probes.search_method
String specifying the search method for finding nodes to transfer field quantities to the data probe lineout.
- data_probes.search_tolerance
Number specifying the search tolerance for locating nodes.
- data_probes.search_expansion_factor
Number specifying the factor to use when expanding the node search.
- data_probes.gzip_level
Optional input, applies to sample planes only. Integer specifying amount of compression to apply to sample plane output. The default
gzip_level=0, means no compression. To apply compression, usegzip_levelfrom 1 to 9, with 9 indicating maximum compression (and slowest speed). Generallygzip_level=1orgzip_level=2is sufficient.
- data_probes.write_coords
Optional input, applies to sample planes only. Boolean specifying whether the sample plane x,y,z coordinates and indices are to be included with every sample plane output. The default is
write_coords=true. Forwrite_coords=false, a separate coordinate file will be written at the beginning of the output sequence if it does not already exist.
- data_probes.time_performance
Optional input, applies to sample planes only. Boolean specifying whether to display timing information when writing sample planes.
- data_probes.specifications
A list of data probe properties with the following parameters
- data_probes.specifications.name
The name used for lookup and logging.
- data_probes.specifications.from_target_part
A list of element blocks (parts) where to do the data probing.
- data_probes.specifications.line_of_site_specifications
A list specifications defining the lineout
Parameter
Description
name
File name (without extension) for the data probe
number_of_points
Number of points along the lineout
tip_coordinates
List containing the coordinates for the start of the lineout
tail_coordinates
List containing the coordinates for the end of the lineout
- data_probes.specifications.plane_specifications
A list specifications defining the sampling plane
Parameter
Description
name
File name (without extension) for the sampling plane
corner_coordinates
List containing the coordinates for the corner of the plane
edge1_vector
List containing the vector defining the first edge of the plane (with origin at corner)
edge2_vector
List containing the vector defining the second edge of the plane (with origin at corner)
edge1_numPoints
Number of points along edge 1
edge2_numPoints
Number of points along edge 2
offset_vector
[Optional] List containing the vector defining the offset direction for additional planes
offset_spacings
[Optional] List containing how far each plane is to be offset in the offset_vector direction
only_output_field
[Optional] Only include the output of this variable in the sample plane output.
- data_probes.specifications.output_variables
A list of field names (and field size) to be probed.
- data_probes.lidar_specifications
Allows line_of_site sampling along trajectories tracing the rosette pattern of a spinner LIDAR.
- data_probes.lidar_specifications.from_target_part
The mesh part containing the spinner LIDAR center coordinates.
- data_probes.lidar_specifications.scan_time
The time for a scan by the simulated spinner LIDAR.
- data_probes.lidar_specifications.number_of_samples
The number of lines generated by the spinner LIDAR sampling. For the text output, this will generate a separate file for each line.
- data_probes.lidar_specifications.points_along_line
The number samples along each lines. This should be chosen based on the spatial resolution of the underlying mesh, the LIDAR. measurements and the beam_length parameter.
- data_probes.lidar_specifications.center
The location of the spinner LIDAR aperture.
- data_probes.lidar_specifications.beam_length
The maximum length over which to sample the velocity on a particular line. The spatial resolution of the sampling is computed from this and the number_of_samples parameter.
- data_probes.lidar_specifications.axis
The orientation vector for the LIDAR measurements.
- data_probes.lidar_specifications.output
Output type for subsampling LIDAR. Either text or netcdf (default).
- data_probes.lidar_specifications.type
Type of LIDAR scan pattern. scanning, radar or spinner (default).
- data_probes.lidar_specifications.warn_on_missing
Warn if points aren’t found in the simulation domain. yes or no (default).
- data_probes.lidar_specifications.reuse_search_data
Save cached search data per line. yes (default) or no.
- data_probes.lidar_specifications.always_output
Output even if no points intersect domain. yes or no (default).
- data_probes.lidar_specifications.scanning_lidar_specifications
Block specifying parameters for the scanning lidar sampling
Parameter
Description
beam_length
Required. Length over which to measure, e.g. 50.
axis
Required. Zero angle vector for the angular sweep, e.g. [1,0,0].
center
Required. Location of the scanning LIDAR, e.g. [0,0,0].
stare_time
Default 1 second. Time line spends at a particular scan angle.
sweep_angle
Default 20 degrees. Extent of angular sweep between sweep_angle/2 to -sweep_angle/2.
step_delta_angle
Default 1 degree. Measurement interval of scan angles over the sweep
reset_time_delta
Default 1 second. Time to reset LIDAR after sweep.
ground_direction
Default [0,0,1]. Orthogonal orientation vector for the LIDAR
elevation_angles
Default none. A list of angles in degrees to change to after each sweep
- data_probes.lidar_specifications.radar_specifications
Block specifying parameters for the radar sampling
Parameter
Description
axis
Required. Zero angle vector for the angular sweep, e.g. [1,0,0].
center
Required. Location of the radar, e.g. [0,0,0]. Ideally outside of the bounding box.
bbox
Optional. Six values (m) describing [bottom-left, top-right] of radar clip box
box_1
Optional. Along with other vertex specifications in (m) describes the radar clip box.
beam_length
Required. Sets the maximum length of the line sampled. Also used if line does not intersect box.
sweep_angle
Default 20 degrees. Extent of angular sweep between -sweep_angle/2 to sweep_angle/2.
angular_speed
Default 30 degrees/s. Speed of the angular sweep.
reset_time_delta
Default 1 second. Time to reset LIDAR after sweep.
ground_direction
Default [0,0,1]. Orthogonal orientation vector for the radar
elevation_angles
Default none. A list of angles in degrees to change to after each sweep
- dataprobes.lidar_specifications.radar_cone_grid
Parameter
Description
cone_angle
Required. cone half angle in degrees centered on radar_specifications.axis
num_circles
Required. Number of rays along the cone angle
lines_per_cone_circle
Required. Number of rays around the cone circumference
- dataprobes.lidar_specifications.radar_cone_filter
Implements a few options for filtering the spherical cap of a cone. truncated_normal{n} rules with n=1,2,3 weight the filtering based on truncated normal distribution, with with the circle of the cone being 1,2, or 3 sigma away. This means that the sampling is more weighted toward the center of the cone with higher n. radau has weight function = 1, optionally changeable to a Gaussian reaching half of its peak value at the cone circle.
Parameter
Description
cone_angle
Required. cone half angle in degrees centered on radar_specifications.axis
quadrature_type
Required. Type of quadrature. radau or truncated_normal{n} (n=1,2,3), or truncated_normal_halfpower.
radau_points
Optional. If radau quadrature is used, number of integration points
radau_weight_type
Default unity. gaussian_halfpower is also supported.
lines_per_cone_circle
Required. Number of rays around the cone circumference
- dataprobes.lidar_specifications.misc
The user may also set a number of parameters corresponding to the hardware configuration of the spinner LIDAR.
Parameter
Description
inner_prism_theta
Default 90 degrees. The starting angle of the inner prism
inner_prism_rotation_rate
Default 3.5 degrees per second. Rotation rate of the inner prism
inner_prism_azimuth
Default 15.2 degrees. azimuthal angle of the inner prism
outer_prism_theta
Default 90 degrees. The starting angle of the outer prism
outer_prism_rotation_rate
Default 6.5 degrees per second. Rotation rate of the outer prism
outer_prism_azimuth
Default 15.2 degrees. azimuthal angle of the outer prism
ground_direction
Default [0,0,1]. Orthogonal orientation vector for the LIDAR
Post-processing
- post_processing
post_processingsubsection defines the different post-processing options. A sample section is shown belowpost_processing: - type: surface physics: surface_force_and_moment output_file_name: results/wallHump.dat frequency: 100 parameters: [0,0] target_name: bottomwall
Note
The variable in the post_processing subsection are prefixed with
post_processing.name but only the variable name after the period should
appear in the input file.
- post_processing.type
Type of post-processing. Possible values are:
Value
Description
surface
Post-processing of surface quantities
- post_processing.physics
Physics to be post-processing. Possible values are:
Value
Description
surface_force_and_moment
Calculate surface forces and moments
surface_force_and_moment_wall_function
Calculate surface forces and moments when using a wall function
- post_processing.output_file_name
String specifying the output file name.
- post_processing.frequency
Integer specifying the frequency of output.
- post_processing.parameters
Parameters for the physics function. For the
surface_force_and_momenttype functions, this is a list specifying the centroid coordinates used in the moment calculation.
- post_processing.target_name
A list of element blocks (parts) where to do the post-processing
ABL Forcing
- abl_forcing
abl_forcingallows the user to specify desired velocities and temperatures at different heights. These velocities and temperatures are enforced through the use of source in the momentum and enthalpy equations. Theabl_forcingoption needs to be specified in themomentumand/orenthalpysource blocks:- source_terms: momentum: abl_forcing enthalpy: abl_forcing
This option allows the code to implement source terms in the momentum and/or enthalpy equations. A sample section is shown below
abl_forcing: search_method: stk_kdtree search_tolerance: 0.0001 search_expansion_factor: 1.5 output_frequency: 1 from_target_part: [fluid_part] momentum: type: computed relaxation_factor: 1.0 heights: [250.0, 500.0, 750.0] target_part_format: "zplane_%06.1f" # The velocities at each plane # Each list include a time and the velocities for each plane # Notice that the total number of elements in each list will be # number of planes + 1 velocity_x: - [0.0, 10.0, 5.0, 15.0] - [100000.0, 10.0, 5.0, 15.0] velocity_y: - [0.0, 0.0, 0.0, 0.0] - [100000.0, 0.0, 0.0, 0.0] velocity_z: - [0.0, 0.0, 0.0, 0.0] - [100000.0, 0.0, 0.0, 0.0] temperature: type: computed relaxation_factor: 1.0 heights: [250.0, 500.0, 750.0] target_part_format: "zplane_%06.1f" temperature: - [0.0, 300.0, 280.0, 310.0] - [100000.0, 300.0, 280.0, 310.0]
Note
The variables in the abl_forcing subsection are
prefixed with abl_forcing.name but only the variable
name after the period should appear in the input file.
- abl_forcing.search_method
This specifies the search method algorithm within the stk framework. The default option stk_kdtree is recommended.
- abl_forcing.search_tolerance
This is the tolerance specified for the search_method algorithm. A default value of 0.0001 is recommended.
- abl_forcing.search_expansion_factor
This option is related to the stk search algorithm. A value of 1.5 is recommended.
- abl_forcing.output_frequency
This is the frequency at which the source term is written to the output value. A value of 1 means the source term will be written to the output file every time-step.
Note
There are now two options in the following inputs.
The can be momentum and/or temperature.
- abl_forcing.momentum.computed
This option allows the user to choose if a momentum source is computed from a desired velocity (
computed) or if a user defined source term is directly applied into the momentum equation (user_defined).
- abl_forcing.momentum.relaxation_factor
This is a relaxation factor which can be used to under/over-relax the momentum source term. The default value is 1.
- abl_forcing.momentum.heights
This is a list containing the planes at which the forcing should be implemented. Each input is the height for that plane. This is the naming convention in the mesh file.
- abl_forcing.momentum.target_part_format
This is the format in which the planes are saved in the mesh file.
- abl_forcing.momentum.velocity_x
A set of lists containing the time in the first element, followed by the desired velocity at each plane in the \(x\) direction.
- abl_forcing.momentum.velocity_y
A set of lists containing the time in the first element, followed by the desired velocity at each plane in the \(y\) direction.
- abl_forcing.momentum.velocity_z
A set of lists containing the time in the first element, followed by the desired velocity at each plane in the \(z\) direction.
Note
The temperature has the same inputs as the momentum source
(abl_forcing.temperature.type,
abl_forcing.temperature.relaxation_factor,
abl_forcing.temperature.heights, and
abl_forcing.temperature.target_part_format)
which take the same options.
- abl_forcing.temperature.temperature
A set of lists containing the time in the first element, followed by the desired temperature at each plane.
Boundary Layer Statistics
- boundary_layer_statistics
The
boundary_layer_statisticssubsection defines the statistics to be gathered from the ABL precursor calculation. This section computes the spatial averages of velocity and (optionally) temperature at all height levels available in the ABL mesh.The outputs are a series of text files (
abl_*_stats.dat) containing the averaged profiles and a netcdf file (e.g.,abl_statistics.nc) containing the time history of the averaged quantities.A sample section is shown below:
boundary_layer_statistics: target_name: [fluid_part] stats_output_file: abl_statistics.nc compute_temperature_statistics: yes output_frequency: 5000 time_hist_output_frequency: 1 height_multiplier: 1.0e6
The various parameters to
boundary_layer_statisticsare described below:
- boundary_layer_statistics.target_name
A list of element blocks (parts) where the ABL statistics are to be computed.
- boundary_layer_statistics.time_filter_interval
The length of time, in seconds, over which to average the statistics given in the
abl_*_stats.datfiles. [Optional, default value:3600.0]
- boundary_layer_statistics.compute_temperature_statistics
A
yesornovalue which indicates whether to include the averaged temperature statistics. [Optional, default value:yes]
- boundary_layer_statistics.output_frequency
The frequency to output statistics in the
abl_*_stats.dattext files. [Optional, default value:10]
- boundary_layer_statistics.time_hist_output_frequency
The frequency, in iterations, of the time history statistics included in the netcdf statistics file. [Optional, default value:
10]
- boundary_layer_statistics.stats_output_file
The name of the netcdf statistics file which includes the time history and averages. [Optional, default value:
abl_statistics.nc]
- boundary_layer_statistics.process_utau_statistics
A
yesornovalue to indicate whether the utau statistics are to be included in the computations. [Optional, default value:yes]
- boundary_layer_statistics.wall_normal_direction
Spatial index to indicate the wall normal direction in the domain. The directions are given by x=``1``, y=``2``, z=``3``. [Optional, default value:
3]
- boundary_layer_statistics.minimum_height
Minimum height to account for negative values in the wall normal direction. [Optional, default value:
0.0]
- boundary_layer_statistics.height_multiplier
For the purposes of determining the unique heights for the ABL statistics, wall normal distances are multiplied by
height_multiplierthen converted into integers for binning. Larger values ofheight_multiplierallow a higher precision to be used in determining the unique heights and better behavior in some meshes. [Optional, default value:2.0e6]
Transfers
- transfers
Transfers section describes the search and mapping operations to be performed between participating realms within a simulation.
Simulations
- simulations
This is the top-level section that orchestrates the entire execution of Nalu-Wind.