Section: Sampling
This section controls data-sampling actions supported within
AMR-Wind. The input parameters below use the label sampling as an example,
as if this was provided to incflo.post_processing in the input file.
For more information on specifying
when sampled data is output to a file, see the post-processing
inputs
- sampling.output_format
type: String, optional, default = “native”
Specify the format of the data outputs. Currently the code supports the following formats
nativeAMReX particle binary format. This is the preferred output format for performance.
asciiAMReX particle ASCII format. Note, this can have significant impact on performance and must be used for debugging only.
netcdfThis requires linking to the netcdf library. If netcdf is linked to AMR-Wind and output format is not specified then netcdf is chosen by default.
- sampling.labels
type: List of one or more names
Labels indicate the names of the different types of samplers (e.g., line, plane, probes) that are used to sample data from the flow field.
For example, if the user uses
Example:
sampling.labels = line1 lidar1 plane1 probe1
Then the code expects to read
sampling.line1, sampling.plane1, sampling.probe1sections to determine the specific sampling probe information.
- sampling.fields
type: List of one or more strings
List of CFD simulation fields to sample and output
- sampling.int_fields
type: List of one or more strings
List of CFD simulation int fields to sample and output (e.g. mask_cell)
- sampling.derived_fields
type: List of one or more strings
List of CFD simulation derived fields to sample and output (e.g. mag_vorticity)
AMReX particle binary format
The native format can be read by ParaView or using Python scripts. We provide an example in the source code and the post processing documentation. A typical data frame might look like:
uid set_id probe_id xco yco zco velocityx velocityy velocityz
0 0 0 0 200.000000 200.0 200.0 6.129077 5.143022 0.0
1 1 0 1 244.444444 200.0 200.0 6.129077 5.144596 0.0
.. ... ... ... ... ... ... ... ... ...
595 595 1 195 555.555556 1000.0 999.0 6.128356 5.142301 0.0
596 596 1 196 666.666667 1000.0 999.0 6.128356 5.142301 0.0
where uid is the global probe id, set_id is the label id
(e.g., plane_sampling.labels = plane1 plane2, numbered as the user
input order), probe_id is the local probe id to this label,
*co are the coordinates of the probe, and the other columns are
the user requested sampled fields. The same labels are seen by other
visualization tools such as ParaView. The directory also contains a
sampling_info.yaml YAML file where additional information (e.g., time) is
stored. This file is automatically parsed by the provided particle
reader tool and the information is stored in a dictionary that is a
member variable of the class.
Sampling along a line
The LineSampler allows the user to sample the flow-field along a line
defined by start and end coordinates with num_points equidistant
nodes.
Example:
sampling.line1.type = LineSampler
sampling.line1.num_points = 21
sampling.line1.start = 250.0 250.0 10.0
sampling.line1.end = 250.0 250.0 210.0
Sampling along a line moving in time (virtual lidar)
The LidarSampler allows the user to sample the flow-field along a line
defined by origin and spanning to length
with num_points equidistant nodes.
Location of the line is given by the time histories
azimuth_table and elevation_table.
Angles are given in degrees with 0 azimuth and 0 elevation being the
x direction. Lidar measurements may also be collected at a constant location
by specifying only one entry to the tables.
Example:
sampling.lidar1.type = LidarSampler
sampling.lidar1.num_points = 21
sampling.lidar1.origin = 250.0 250.0 10.0
sampling.lidar1.length = 500.0
sampling.lidar1.time_table = 0 10.0
sampling.lidar1.azimuth_table = 0 90.0
sampling.lidar1.elevation_table = 0 45.0
Sampling on one or more planes
The PlaneSampler samples the flow-field on two-dimensional planes defined by
two axes: axis1 and axis2 with the bottom corner located at origin
and is divided into equally spaced nodes defined by the two entries in
num_points vector. Multiple planes parallel to the reference planes can be
sampled by specifying the offset_vector vector along which the planes are
offset for as many planes as there are entries in the offset array.
Example:
sampling.plane1.type = PlaneSampler
sampling.plane1.axis1 = 1.0 0.0 0.0
sampling.plane1.axis2 = 0.0 0.0 1.0
sampling.plane1.origin = 0.0 0.0 0.0
sampling.plane1.num_points = 10 10
sampling.plane1.offset_vector = 1.0 0.0 0.0
sampling.plane1.offsets = 0.0 2.0 3.0
Illustration of this example:
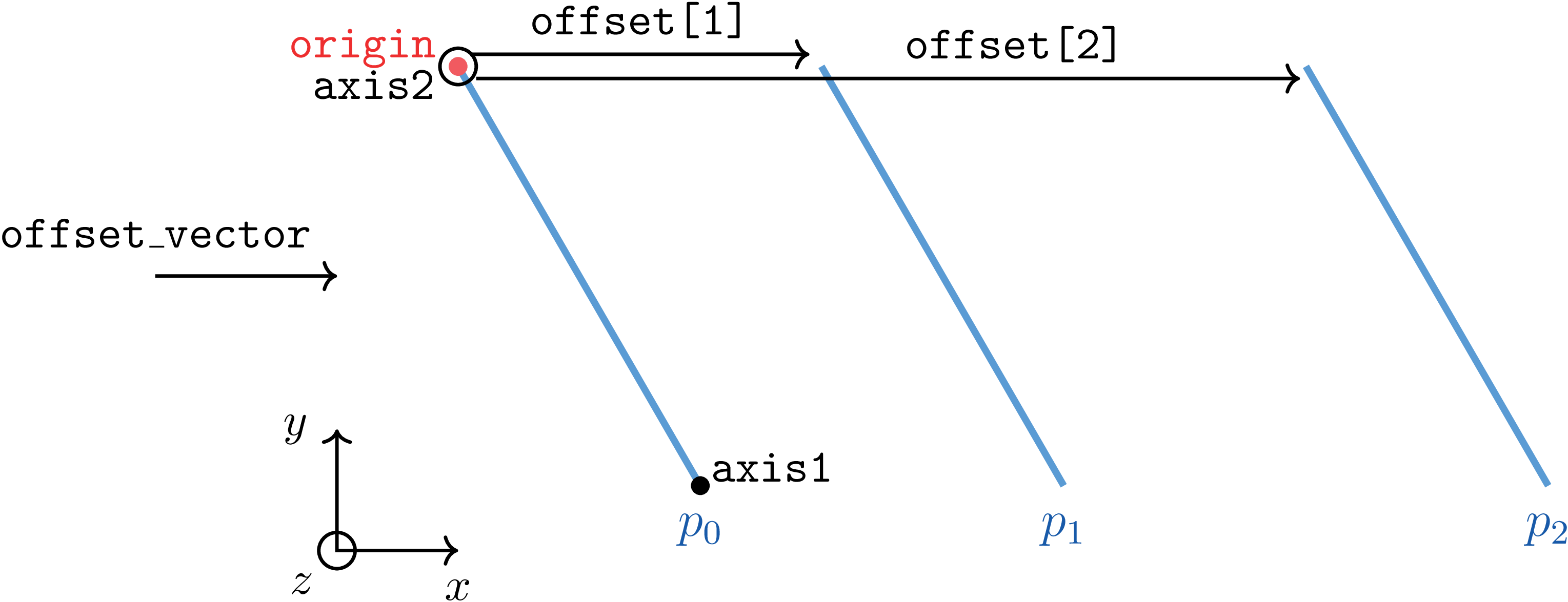
1 Example of sampling on planes.
Sampling at arbitrary locations
The ProbeSampler allows the user to sample the flow field at arbitrary
locations read from a text file (default: probe_locations.txt).
Example:
sampling.probe1.type = ProbeSampler
sampling.probe1.probe_location_file = "probe_locations.txt"
The first line of the file contains the total number of probes for this set.
This is followed by the coordinates (three real numbers), one line per probe.
This type of sampler also supports the offset_vector and offsets options
implemented with the plane sampler, shown above. For the probe sampler,
these options apply offsets to the positions of all the points provided in the
probe location file.
Sampling on a volume
The VolumeSampler samples a 3D volume that starts at lo and
extends to hi. The resolution in all directions is specified by
num_points.
Example:
sampling.volume1.type = VolumeSampler
sampling.volume1.hi = 3.0 1.0 0.5
sampling.volume1.lo = 0.0 0.0 -0.5
sampling.volume1.num_points = 30 10 10
Sampling on the air-water interface
The FreeSurfaceSampler samples on the air-water interface, and it requires the
vof (volume-of-fluid) field to be present in order to function. The sample locations
are specified using a grid that starts at plane_start and
extends to plane_end. The resolution in each direction is specified by
plane_num_points. The coordinates of the sampling
locations are determined by the location of the air-water interface in the search
direction, specified by search_direction, and the other coordinates are
determined by the plane_ parameters. The default search direction parameter
is 2, indicating the samplers will search for the interface along the z-direction.
Due to this design, it is best to specify a plane that is normal to the intended
search direction.
Another optional parameter is num_instances, which is available
for cases where the interface location is multi-valued along the search direction,
such as during wave breaking. This parameter defaults to 1, and the sampler will
automatically select the highest position along the search direction when the interface
location is multi-valued.
The free surface location is calculated with
a geometric approach using the reconstruction of the interface in a computational
cell. However, within the numerical beach of a wave simulation, the volume fraction distribution
can become noisy, and the geometric approach produce noisy results. To avoid this,
there is an option to use a linear interpolation approach instead within the beach,
which helps to reduce the noise. This can be turned on using the argument
linear_interp_extent_from_xhi, which specifies the extent from the upper domain boundary (in x)
where linear interpolation should be used instead of the standard geometric approach. This
input parameter should be set to the length of the numerical beach.
Example:
sampling.fs1.type = FreeSurfaceSampler
sampling.fs1.plane_start = 4.0 -1.0 0.0
sampling.fs1.plane_end = 0.0 1.0 0.0
sampling.fs1.plane_num_points = 20 10